Пример 1
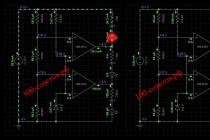
Определить передаточное отношение зубчатой передачи (рис. 19), число оборотов ведомого вала и общий коэффициент полезного действия (кпд), если количества зубьев колес равны: z 1 =30, z 2 =20, z 3 =45, z 4 =30, z 5 =20, z 6 =120, z 7 =25, z 8 =15 ; число оборотов ведущего вала n 1 =1600 об/мин.
Решение
Механизм состоит из четырех ступеней: двух цилиндрических z 1 - z 2 , z 3 - z 4 с внешним зацеплением, цилиндрической z 5 - z 6 с внутренним зацеплением и конической z 7 - z 8 .
Общее передаточное отношение многоступенчатой передачи равно произведению передаточных отношений каждой ступени, образующих этот зубчатый механизм. Для данного случая
 .
.
Знак (–) показывает, что направление вращения колес в этих парах противоположное. Направление вращения колес в данном случае так же можно определить путем простановки стрелок на схеме (рис. 19).
Число оборотов
ведомого вала определяем через
передаточное отношение
 об/мин.
об/мин.
Общий кпд зубчатого механизма равен
где числовые значения приняты согласно условию задачи Т1.
Пример 2
Здесь
 ,
, ,
, – передаточные отношения преобразованного
механизма (водилоН
остановлено, а вращается неподвижное
колесо z
3
).
Полученное передаточное отношение со
знаком «+» свидетельствует о совпадении
направлений вращения ведущего и ведомого
валов.
– передаточные отношения преобразованного
механизма (водилоН
остановлено, а вращается неподвижное
колесо z
3
).
Полученное передаточное отношение со
знаком «+» свидетельствует о совпадении
направлений вращения ведущего и ведомого
валов.
Пример 3
Решение
Как и в примере 2 этот механизм относится к одноступенчатой планетарной передаче и передаточное отношение от водила Н к колесу z 1 определяется отношением
Пример 4
Решение
Сложная зубчатая передача состоит из двух ступеней: первая ступень – простая цилиндрическая пара с внешним зацеплением z 1 -z 2 , вторая ступень – планетарный механизм Н- z 5 , передающий вращательное движение от водила Н к колесу z 5 через сателлит z 4 . Направление вращения выходного вала определяется алгебраическим знаком.
1. Для двухступенчатой передачи общее передаточное отношение находим через передаточные отношения каждой ступени, т.е.
 .
.
Полученное
передаточное отношение
 ,
что свидетельствует о повышении частоты
вращения выходного вала, а знак «+»
показывает, что направления вращения
валов совпадают.
,
что свидетельствует о повышении частоты
вращения выходного вала, а знак «+»
показывает, что направления вращения
валов совпадают.
2. Определяем
угловую скорость выходного звена
 и его угловое ускорение
и его угловое ускорение
 рад/с,
рад/с,
 рад/с 2 .
рад/с 2 .
3. Поскольку вращение колес ускоренное (принимаем равноускоренное), то время, в течение которого угловые скорости увеличатся в два раза, определим из зависимости
 ,
,
где
 и
и - угловые скорости соответственно в
начале и в конце рассматриваемого
периода времени
- угловые скорости соответственно в
начале и в конце рассматриваемого
периода времени .
Отсюда
.
Отсюда
 с.
с.
4. Определяем общий коэффициент полезного действия передачи
Задача Т2
Выходное
звено механизма, показанного на схемах
(рис. 23–32), совершает возвратно-поступательное
(или возвратно-вращательное) движение
и нагружено на рабочем ходу постоянной
силой F
c
(или
моментом Т
с
)
полезного сопротивления. На холостом
ходу, при обратном направлении движения
выходного звена, полезное сопротивление
отсутствует, но продолжают действовать
вредные. Учитывая действие трения в
кинематических парах, по коэффициенту
полезного действия
 механизма необходимо определить:
механизма необходимо определить:
1) движущий момент Т д , постоянный по величине, который нужно приложить к входному звену при установившемся движении с циклом, состоящим из рабочего и холостого ходов;
2) работы сил трения на рабочем и холостом ходах, считая, что вредное сопротивление постоянно на каждом из ходов, но на рабочем ходу оно в три раза больше, чем на холостом;
3) изменение кинетической энергии механизма за время рабочего хода и за время холостого хода;
4)
мощность, требуемую от привода при
вращении входного звена со
средней скоростью
 и средние (за целый оборот) мощности
полезного сопротивления и сил трения.
и средние (за целый оборот) мощности
полезного сопротивления и сил трения.
Решение
этой задачи основано на уравнении
движения механизма, устанавливающем
связь между изменением кинетической
энергии и работами сил (законе кинетической
энергии). Работа сил и моментов
определяется соответственно по линейным
или угловым перемещениям звеньев,
на которые они действуют. В связи с этим
требуется определить положения механизма
при крайних положениях выходного звена.
Перемещения звеньев, линейные и угловые,
можно определить по чертежу,
выполненному в масштабе, или рассчитать
аналитически. Размеры звеньев,
согласно их обозначениям на схеме
механизма, и другие необходимые величины
приведены в таблицах числовых данных,
где
 – коэффициент полезного действия, а в
варианте 9m
– модуль реечного зацепления, z
–
число зубьев колеса.
– коэффициент полезного действия, а в
варианте 9m
– модуль реечного зацепления, z
–
число зубьев колеса.
Таблица 17
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
ОА , мм | ||||||||||
|
ОС , мм | ||||||||||
|
ВС , мм | ||||||||||
|
АВ , мм | ||||||||||
|
Т с , Нм | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 18
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
ОА, мм | ||||||||||
|
АВ, мм | ||||||||||
|
F c , Н | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 19
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
ОА , мм | ||||||||||
|
ОВ , мм | ||||||||||
|
Т с , Нм | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 20
|
Величина |
Предпоследняя цифра шифра |
|||||||||||||||||||||
|
ОА, мм | ||||||||||||||||||||||
|
ОВ, мм | ||||||||||||||||||||||
|
ВС=В D , мм | ||||||||||||||||||||||
|
F c , Н | ||||||||||||||||||||||
|
| ||||||||||||||||||||||
|
| ||||||||||||||||||||||

 ,
рад/с
,
рад/сТаблица 21
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
R , мм | ||||||||||
|
ОА, мм | ||||||||||
|
F c , Н | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 22
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
ОА , мм | ||||||||||
|
ОВ, мм | ||||||||||
|
BD , мм | ||||||||||
|
F c , Н | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 23
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
ОА , мм | ||||||||||
|
е, мм | ||||||||||
|
F c , Н | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 24
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
R , мм | ||||||||||
|
ОА, мм | ||||||||||
|
r , мм | ||||||||||
|
| ||||||||||
|
F c , Н | ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 25
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
ОА, мм | ||||||||||
|
АВ, мм | ||||||||||
|
m , мм | ||||||||||
|
| ||||||||||
|
Т с, Нм | ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сТаблица 26
|
Величина |
Предпоследняя цифра шифра |
|||||||||
|
ОА, мм | ||||||||||
|
ОВ , мм | ||||||||||
|
F c , Н | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
рад/с
,
рад/сПоследовательность
выполнения задания. Во-первых необходимо
построить механизм в крайних положениях,
и по заданным направлениям угловой
скорости входного звена
 и постоянной силыF
с
(или
момента Т
с
)
полезного сопротивления установить
рабочие и холостые ходы.
и постоянной силыF
с
(или
момента Т
с
)
полезного сопротивления установить
рабочие и холостые ходы.
При графическом определении линейных и угловых перемещений звеньев необходимо снять с чертежа:
1) для
входного звена его углы поворота на
рабочем ходу
 и на холостом
и на холостом х;
х;
2) для
выходного звена при его возвратно-поступательном
движении линейное перемещение, т.е.
ход s
,
или при его возвратно-вращательном
движении угол размаха
 .
.
Для того чтобы определить зоны рабочего и холостого ходов для входного звена, нужно учитывать связь движения с показанным направлением действия полезного сопротивления, которое на рабочем ходу должно препятствовать движению выходного звена.
В вариантах 5 и 8 применено геометрическое замыкание звеньев в высшей паре, предупреждающее отход звеньев друг от друга: в варианте 8 ролик радиуса r перекатывается в круговом пазу входного звена, охваченный наружным и внутренним профилями паза, в варианте 5 круглый эксцентрик охвачен рамкой выходного звена.
ВВЕДЕНИЕ
Червячная передача относится к передачам зацеплением с перекрещивающимися осями валов.
Основные достоинства червячных передач: возможность получения больших передаточных чисел в одной паре, плавность зацепления, возможность самоторможения. Недостатки: сравнительно низкий к.п.д., повышенный износ и склонность к заеданию, необходимость применения для колес дорогих антифрикционных материалов.
Червячные передачи дороже и сложнее зубчатых, поэтому их применяют, как правило, при необходимости передачи движения между перекрещивающимися валами, а также там, где необходимо большое передаточное отношение.
Критерием работоспособности червячных передач является поверхностная прочность зубьев, обеспечивающая их износостойкость и отсутствие выкрашивания и заедания, а также изгибная прочность. При действии в червячном зацеплении кратковременных перегрузок проводится проверка зубьев червячного колеса на изгиб по максимальной нагрузке.
Для тела червяка осуществляется проверочный расчет на жесткость, а также проводится тепловой расчет.
Проектирование осуществляется в два этапа: проектировочный - из условий контактной выносливости определяются основные размеры передачи и проверочный - при известных параметрах передачи в условиях ее работы определяются контактные и изгибные напряжения и сравниваются с допускаемыми по выносливости материала.
Определяются силы, нагружающие подшипники и производится подбор подшипников по грузоподъемности.
КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТ
Выбор электродвигателя
Для выбора электродвигателя определяются требуемая его мощность и частота вращения.
Согласно исходным данным на проектирование, требуемую мощность для выполнения технологического процесса можно найти из формулы:
Р вых =F t V, (2.1)
где Р вых - мощность на выходном валу привода, Вт;
F t - тяговое усилие, Н;
V - скорость движения рабочего органа, м/с;
Р вых = 1,5 кВт.
Определение общего К.П.Д. привода
Тогда в соответствии с кинематической цепочкой передачи мощности общий К.П.Д. всего привода рассчитывается по формуле:
з общ = з 1 з 2 з 3 з 4 (2.2)
з общ = 0,80,950,980,99 = 0,74.
Таким образом, из расчета общего К.П.Д. стало видно, что в процессе работы привода только 74% мощности от двигателя будет поступать к барабану лебедки.
Определим требуемую мощность двигателя для нормальной работы лебедки:
Принимаем двигатель мощностью 2,2 кВт.
Расчет частоты вращения вала электродвигателя
Поскольку на данном этапе еще неизвестны передаточные числа передач привода и не известна частота вращения вала двигателя, возникает возможность рассчитать желаемую частоту вращения вала электродвигателя.
Для этого проведены следующие расчеты.
Определение частоты вращения выходного вала привода
Согласно исходным данным угловая скорость выходного вала рассчитывается по формуле:
где щ - угловая скорость, с -1 ;
D б - диаметр барабана, м;
v - скорость движения рабочего органа, м/с.
Найдем частоту вращения, зная угловую скорость по формуле:
об/мин. (2.5)
Определение желаемого передаточного числа привода
Из анализа кинематической схемы привода электролебедки видно, что общее передаточное число его (u общ) образуется за счет передаточного числа редуктора червячной передачи.
Принимаем u чп = 50. Взаимосвязь между частотами вращения вала электродвигателя n дв и выходного вала n з определяется зависимостью:
n дв = n з u общ, (2.6)
тогда желаемая частота вращения вала электродвигателя составит:
n дв = 38,250 = 1910 об/мин.
Согласно имеющейся номенклатуре двигателей наиболее близким к желаемой частоте вращения является двигатель с синхронной частотой вращения, равной 1500 об/мин. С учетом вышеизложенного, окончательно принимаем двигатель марки: 90L4/1395. серии АИР, который обладает следующими характеристиками:
Р дв = 2,2 кВт;
n дв = 1500 об/мин.
Кинематические расчеты
Общее передаточное число:
u общ = n дв / = 1500/38,2=39,3.
Определим все кинематические характеристики проектируемого привода, которые понадобятся в дальнейшем для детальной проработки передачи. Определение частоты и скоростей вращения. Частоты вращения всех валов легко рассчитать, начиная, от выбранной частоты вращения вала электродвигателя с учетом того, что частота вращения каждого последующего вала определяется через частоту вращения предыдущего по формуле (2.7) с учетом передаточного числа:
где n (i+1) - частота вращения i+1 вала, об/мин;
u i -(i+1) - передаточное отношении между i и i+1 валами.
Моменты на валах редуктора:
Т 1 =9,5510 3 (Р/n э)= 9,5510 3 (2,2/1500)=14,0 Нм
Т 2 =Т 1 u=14,039,3=550 Нм.
Требуемая мощность привода определяется по формуле :
где Т 2 – момент на выходном валу (Нм);
n 2 – частота вращения выходного вала (об/мин).
Определение требуемой мощности электродвигателя.
Требуемая мощность электродвигателя определяется по формуле

где η редуктора – КПД редуктора;
Согласно кинематической схеме заданного привода КПД редуктора определяется по зависимости:
η редуктора = η зацепления η 2 подшипников η муфты ,
где η зацепления – КПД зубчатого зацепления; принимаем η зацепления = 0,97 ;
η подшипников – КПД пары подшипников качения; принимаем η подшипников = 0,99 ;
η муфты – КПД муфты; принимаем η муфты = 0,98 .
1.3. Определение частоты вращения вала электродвигателя.
Определяем диапазон оборотов, в котором может находится синхронная частота вращения электродвигателя по формуле:
n с = u n 2 ,
где u – передаточное число ступени; выбираем диапазон передаточных чисел, который рекомендуется для одной ступени цилиндрической зубчатой передачи в интервале от 2 – 5 .
Например : n с = u n 2 = (2 – 5)200 = 400 – 1000 об/мин.
1.4. Выбор электродвигателя.
По величине требуемой мощности электродвигателя Р потр. (с учетом, что Р эл.дв. ≥ Р потр. ) и синхронной частоте вращения вала n с выбираем электродвигатель :
серия …..
мощность Р = ……кВт
синхронная частота вращения n с = …..об/мин
асинхронная частота вращения n 1 = …..об/мин.

Рис. 1. Эскиз электродвигателя.
1.5. Определение передаточного числа редуктора.

По расчетному значению передаточного числа выбираем стандартное значение, с учетом погрешности, из ряда передаточных чисел . Принимаем u ст. = ….. .
1.6. Определение, частот вращения и крутящих моментов на валах редуктора.
Частота вращения входного вала n 1 = ….. об/мин.
Частота вращения выходного вала n 2 = ….. об/мин.
Крутящий момент на колесе выходного вала:

Крутящий момент на шестерне входного вала:

2. РАСЧЕТ ЗАКРЫТОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ.
2.1. Проектировочный расчет.
1. Выбор материала колес.
Например :
Шестерня Колесо
Н B = 269…302 Н B = 235…262
Н B 1 = 285 Н B 2 = 250
2. Определяем допускаемые контакты напряжения для зубьев шестерни и колеса :

где H lim – предел выносливости контактной поверхности зубьев, соответствующий базовому числу циклов переменных напряжений; определяется в зависимости от твердости поверхности зубьев или задается числовое значение ;
Например : H lim = 2HB +70.
S H – коэффициент безопасности; для зубчатых колес с однородной структурой материала и твердость поверхности зубьев HB 350 рекомендуется S H = 1,1 ;
Z N – коэффициент долговечности; для передач при длительной работе с постоянным режимом нагружения рекомендуется Z N = 1 .
Окончательно за допускаемое контактное напряжение принимается меньшее из двух значений допускаемых контактных напряжений колеса и шестерни [ Н ] 2 и [ Н ] 1:[ Н ] = [ Н ] 2 .
3. Определяем межосевое расстояние из условия контактной выносливости активных поверхностей зубьев .

где Е пр – приведенный модуль упругости материалов колес; для стальных колес можно принять Е пр = 210 5 МПа ;
ba – коэффициент ширины колеса относительно межосевого расстояния; для колес расположенных симметрично относительно опор рекомендуется ψ ba = 0,2 – 0,4 ;
К H – коэффициент концентрации нагрузки при расчетах по контактным напряжениям.
Для определения коэффициента К H необходимо определить коэффициент относительной ширины зубчатого венца относительно диаметра ψ bd : ψ bd = 0,5ψ ba (u 1)=….. .
По графику рисунка ….. с учетом расположения передачи относительно опор, при твердости НВ 350, по величине коэффициента ψ bd находим: К H = ….. .
Вычисляем межосевое расстояние:
Например :
Для редукторов межосевое расстояние округляем по ряду стандартных межосевых расстояний или ряду Ra 40 .
Назначаем а W = 120 мм.
4. Определяем модуль передачи.
m = (0,01 – 0,02)а W = (0,01 – 0,02)120 = 1,2 – 2,4 мм.
По ряду модулей из полученного интервала назначаем стандартное значение модуля: m = 2 мм.
5. Определяем число зубьев шестерни и колеса.
Суммарное число зубьев шестерни и колеса определяем из формулы: а W = m (z 1 +z 2 )/2;
отсюда z = 2а W /m = …..; принимаем z = ….. .
Число зубьев шестерни: z 1 = z /(u 1) = …..
Для устранения подрезания зубъев z 1 ≥ z min ; для прямозубого зацепления z min = 17 . Принимаем z 1 = ….. .
Число зубьев колеса: z 2 = z - z 1 = .. Рекомендуется z 2 100 .
6. Уточняем передаточное число.
Определяем фактическое передаточное число по формуле:

Погрешность значения фактического передаточного числа от расчетного значения:

Условие точности проектирования выполняется .
За передаточное число редуктора принимаем u факт = ….. .
7. Определяем основные геометрические размеры шестерни и колеса.
Для колес нарезанных без смещения инструмента:
диаметры начальных окружностей
d W = d
угол зацепления и угол профиля
α W = α = 20º
делительные диаметры
d 1 = z 1 m
d 2 = z 2 m
диаметры вершин зубьев
d а1 = d 1 +2 m
d а2 = d 2 +2 m
диаметры впадин
d f 1 = d 1 –2,5 m
d f 2 = d 2 –2,5 m
высота зуба
h = 2,25 m
ширина зубчатого венца
b w = ψ ba а W
ширина венца шестерни и колеса
b 2 = b w
b 1 = b 2 + (3 – 5) = ….. . Принимаем b 1 = ….. мм.
проверяем величину межосевого расстояния
a w = 0,5 (d 1 + d 2 )
Министерство образования и науки Российской Федерации.
Федеральное агентство по образованию.
Государственное образовательное учреждение высшего профессионального образования.
Самарский государственный технический университет.
Кафедра: «Прикладная механика»
Курсовой проект по механике
Студент 2 – ХТ – 2
Руководитель: к. т. н., доцент
Техническое задание №65.
Коническая передача.
Частота вращения вала электродвигателя:
.Вращающий момент на выходном валу редуктора:
.Частота вращения выходного вала:
.Cрок службы редуктора в годах:
.Коэффициент загрузки редуктора в течение года:
.Коэффициент загрузки редуктора в течение суток:
.1. Введение_________________________________________________________4
2. Кинематический и силовой расчёт привода__________________________4
2.1 Определение частот вращения валов редуктора______________________4
2.2. Расчёт чисел зубьев колёс________________________________________4
2.3. Определение фактического передаточного отношения_______________5
2.4. Определение КПД редуктора_____________________________________5
2.5. Определение номинальных нагрузочных моментов на каждом валу, схема механизма___________________________________________________5
2.6. Расчёт потребной мощности и выбор электродвигателя, его размеры___5
3. Выбор материалов и расчёт допускаемых напряжений_________________7
3.1. Определение твёрдости материалов, выбор материала для зубчатого колеса____________________________________________________________7
3.2. Расчет допускаемых напряжений _________________________________7
3.3. Допускаемые напряжения на контактную выносливость______________7
3.4. Допускаемые напряжения на изгибную выносливость________________8
4. Проектный и проверочный расчёт передачи__________________________8
4.1. Вычисление предварительного делительного диаметра шестерни______8
4.2. Вычисление предварительного модуля передачи и уточнение его по ГОСТу___________________________________________________________8
4.3. Расчёт геометрических параметров передачи_______________________8
4.4. Проверочный расчёт передачи___________________________________9
4.5. Усилия в зацеплении___________________________________________9
5. Проектный расчёт вала и выбор подшипников ______________________12
6. Эскизная компоновка и расчёт элементов конструкции_______________12
6.1. Расчёт зубчатого колеса________________________________________12
6.2. Расчёт элементов корпуса______________________________________13
6.3. Расчёт мазеудерживающих колец_______________________________13
6.4. Расчёт крышки подшипников__________________________________13
6.5. Выполнение компоновочного чертежа__________________________13
7. Подбор и проверочный расчёт шпоночных соединений _______________14
8. Проверочный расчёт вала на усталостную выносливость______________15
9. Проверочный расчёт подшипников выходного вала на долговечность___18
10. Подбор и расчет соединительной муфты___________________________19
11. Смазывание редуктора__________________________________________19
12. Сборка и регулировка основных узлов редуктора___________________20
13. Список используемой литературы________________________________22
14. Приложения__________________________________________________23
Введение.
Редуктором называют механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного агрегата и служащий для передачи вращения от вала двигателя к валу рабочей машины.
Назначение редуктора – понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим.
Редуктор состоит из корпуса (литого чугунного или сварного стального), в котором помещают элементы передачи – зубчатые колеса, валы, подшипники и т.д. В отдельных случаях в корпусе редуктора размещают также устройства для смазывания зацеплений и подшипников или устройства для охлаждения.
Редукторы классифицируют по следующим основным признакам: типу передачи (зубчатые, червячные или зубчато-червячные); числу ступеней (одноступенчатые, двухступенчатые и т.д.); типу зубчатых колес (цилиндрические, конические, коническо-цилиндрические и т.д.); относительному расположению валов редуктора в пространстве (горизонтальные, вертикальные); особенностям кинематической схемы (развернутая, соосная, с раздвоенной ступенью и т.д.).
Конические редукторы применяют для передачи движения между валами, оси которых пересекаются обычно под углом 90. Передачи с углами, отличными от 90 , встречаются редко.
Наиболее распространённый тип конического редуктора - редуктор с вертикально расположенным тихоходным валом. Возможно исполнение редуктора с вертикально расположенным быстроходным валом; в этом случае привод осуществляется от фланцевого электродвигателя
Передаточное число u одноступенчатых конических редукторов с прямозубыми колёсами, как правило, не выше 3; в редких случаях u = 4.При косых или криволинейных зубьях u = 5 (в виде исключения u = 6.3).
У редукторов с коническими прямозубыми колёсами допускаемая окружная скорость (по делительной окружности среднего диаметра) v ≤ 5 м/с. При более высоких скоростях рекомендуют применять конические колёса с круговыми зубьями, обеспечивающими более плавное зацепление и большую несущую способность.
2 Кинематический и силовой расчет привода.
2.1 Определение частот вращения валов редуктора:
.Частота вращения первого (входного) вала:
.Частота вращения второго (выходного) вала:
.2.2 Расчёт чисел зубьев передач.
Расчётное число зубьев шестерни
определяют в зависимости от величины передаточного отношения передачи:Значение
округляют до целого числа по правилам математики: .Расчётное число зубьев колеса
, необходимое для реализации передаточного числа , определяют по зависимости: .Значение
округляют до целого числа : .2.3 Определение фактического передаточного отношения:
.2.4 Определение КПД редуктора.
Для конического редуктора
.Вращающий (нагрузочный) момент на выходном валу редуктора:
.На входном валу:
.2.5 Определение номинальных нагрузочных моментов на каждом валу, схема механизма.
Мощность на выходном валу редуктора, кВт:
кВт , где: - вращающий момент выходного вала, - частота вращения выходного вала.Расчетная мощность электродвигателя.
Исходные данные для проектирования электромеханического привода выбираются каждым студентом из таблицы 1: мощность – по последней цифре шифра своей зачётной книжки; частота вращения – по предпоследней цифре шифра своей зачётной книжки.
Таблица 1 - Исходные данные для задачи 6
|
Наименование параметра |
Варианты |
|||||||||
|
Мощность привода Р ПР (кВт) на выходном валу |
||||||||||
|
Частота вращения вы-ходного вала n ВЫХ (мин -1) |
||||||||||
|
Частота вращения вала электродвигателя – вала входного n ВХ (мин -1) |
||||||||||
6.1. Информация для справки
Мощность есть величина, характеризующая работу, совершаемую в единицу времени, либо силу, точка приложения которой движется с какой-то скоростью.
Единица мощности – ватт (Вт): 1Вт – мощность, при которой за время 1с совершается работа 1Дж (джоуль).
В задаче применяют производную от ватта – киловатт: 1кВт=1000Вт.
В расчетах следует учитывать, что в исходных данных задана величина мощности, которая необходима для приведения в движение исполнительного механизма (ленты конвейера и тому подобное), и требуется определить мощность электрического двигателя, которой будет достаточно для вращения всего механического привода и исполнительного механизма с учётом условий эксплуатации привода.
Частота вращения вала есть величина, выражающая число полных оборотов вала вокруг своей оси в одну минуту.
Выходным валом электромеханического привода в случае использования ремённой передачи является тихоходный вал редуктора, соединяемый жёсткой муфтой с рабочим валом исполнительного механизма, в случае цепной передачи – рабочий вал исполнительного механизма, на котором закреплена большая звёздочка.
Обозначение единиц измерения частоты вращения: n (мин -1).
В старых изданиях учебной и справочной литературы частота вращения валов измеряется в оборотах в минуту и обозначается: n (об/мин). Количественно обе эти характеристики единиц измерения равны между собой, но следует применять первое обозначение: n (мин -1).
Краткие сведения об устройстве электромеханического привода
Привод электромеханический – система открытых и закрытых механических передач с электродвигателем для приведения в движение различных исполнительных механизмов, например, конвейера.
Открытые передачи (ремённые или цепные) обычно состоят из нескольких деталей: двух тел вращения (шкивов или звёздочек) различных диаметров, закреплённых жёстко каждое на своём валу и передающих вращающий момент между собой при помощи гибкой связи (ремня или цепи).
Закрытой механической передачей является зубчатый редуктор, закрытый от внешнего воздействия корпусом, содержащий зубчатые колёса и шестерни и предназначенный для передачи вращательного движения с понижением частоты вращения выходного вала(со стороны конвейера) по сравнению с входным (со стороны электродвигателя).
Соосные (расположенные на одной продольной оси) валы соединены муфтами.
На рисунке 1 показана кинематическая схема заданного для расчётов электромеханического привода к ленточному конвейеру.
Рисунок 1 – Кинематическая схема электромеханического привода к ленточному конвейеру
Привод состоит из электродвигателя 1, специальной муфты 2, ремённой передачи 3, редуктора 10, цепной передачи 13. Вал электродвигателя 1 соединяется с валом 4 малого шкива 5 клиноремённой передачи 3 при помощи муфты 2, которая передаёт вращение и дополнительно компенсирует несоосность валов. Вал 4 малого шкива 5 установлен в отдельных подшипниках качения. Вращение от малого шкива 5 к большому шкиву 6 передаётся при помощи клинового ремня. От большого шкива 6 вращение через быстроходный входной вал 7, зубчатые колёса и шестерни и промежуточный вал редуктора (на схеме не пронумерован) передается на тихоходный выходной вал 8 редуктора 10. Далее через муфту 2 вращение передается отдельному валу 11 малой звёздочки 12, установленному в отдельных опорах с подшипниками качения, а от малой звёздочки 12 при помощи втулочной цепи – к большой звёздочке 14, которая закреплена на конце рабочего вала 9 исполнительного механизма 15 – ленточного конвейера.
6.2. Определение силовых параметров привода
6.2.1. Подбор электродвигателя
Входная мощность Р ВХ (кВт) на валу электродвигателя, величина которой обеспечит заданную мощность на выходном валу привода Р ПР (кВт), определяется с учетом общего для всех элементов привода коэффициента полезного действия (КПД) – η , то есть суммарных потерь мощности:
Общий КПД заданного привода определяется по формуле:
где η РП – КПД ремённой передачи; η Р - КПД редуктора; η ЦП – КПД цепной передачи; η П - КПД одной пары подшипников качения; η М – КПД муфты, Ч – число пар подшипников; К – количество муфт между валами.
Значения КПД для различных элементов привода:
клиноремённая передача – 0,95;
редуктор –0,97;
цепная передача – 0,90;
муфта – 0,98;
одна пара подшипников – 0,99.
Найденное значение Р ВХ сравниваем с данными справочной литературы
И выбираем номинальную мощность электродвигателя Р НОМ с ближайшим большим значением, так как должно быть выполнено условие: .
6.2.2. Расчёт мощности, передаваемой каждым валом привода
Мощность определяется с учетом значений КПД всех элементов привода и их количества, расположенных от вала электродвигателя до вала, мощность которого рассчитывается: есть ли механическая передача, а на рассчитываемом валу муфта и сколько всего на этом участке пар подшипников.
1. Мощность, передаваемая первым валом привода (кВт) – валом малого шкива клиноременной передачи:
Р I =Р ВХ · η М · η П .
2. Мощность, передаваемая вторым валом привода (кВт) – входным валом редуктора после клиноременной передачи:
P II = P I · η РП · η П .
3. Мощность, передаваемая третьим валом привода (кВт) – выходным валом редуктора:
P I I I = P I I · η Р · η М · η 3 П .
4. Мощность, передаваемая четвёртым валом привода (кВт) – выходным
валом большой звёздочки цепной передачи – рабочим валом исполнительного механизма:
P I V = P I II · η ЦП · η П .
6.3. Определение кинематических параметров привода
6.3.1. Расчёт передаточных чисел передач привода
1.Передаточное число привода:
Передаточное число привода U ПР представляет собой произведение передаточных чисел клиноременной U РЕМ , цепной U ЦЕП передач и зубчатого редуктора U Р , то есть:
U ПР = U РЕМ U Р U ЦЕП .
Расчёт значений множителей начинают с назначения передаточного числа редуктора Ц2У-315Н по стандартным значениям и относительно этого числа ведут дальнейший расчёт, выполняя условие, чтобы передаточные числа открытых передач также находились в допустимых значениях: для клиноремённых – 1,5…4, для цепных – 2…5. Для того чтобы габаритные размеры открытых передач не были чрезмерно большими, следует придерживаться минимальных величин рекомендуемых значений передаточных чисел, не доводя их до наибольших.
6.3.2. Расчёт частоты вращения каждого вала привода
Частота вращения валов определяется с учетом рассчитанных передаточных чисел клиноремённой передачи, зубчатого редуктора и цепной передачи привода.
1. Частота вращения первого вала (соосного с валом электродвигателя) (мин -1):
n I = n ВХ .
2. Частота вращения второго вала привода (мин -1) – входного (быстроходного) вала редуктора после клиноремённой передачи:
3. Частота вращения третьего вала привода (мин -1) – выходного вала редуктора:
4. Частота вращения четвёртого вала привода (мин -1) – вала большой звёздочки цепной передачи – рабочего вала исполнительного механизма:
6.4. Расчёт вращающего момента на каждом валу привода
Вращающий момент Т (Нм), передаваемый каждым валом привода, определяется с учетом мощности Р (кВт) и частоты вращения вала n (мин -1):
1. Для первого вала привода:
2. Для второго вала привода:
3. Для третьего вала привода:
4. Для четвёртого вала привода:
6.5. Полученные в результате расчётов данные сводят в таблицу.
Таблица 2 – Нагрузочные и кинематические характеристики на валах
|
Р, (кВт) |
n , (мин -1 ) |
Т, (Нм) |
|